OpenWRT(五)驱动开发 |
您所在的位置:网站首页 › openwrt 驱动编译 › OpenWRT(五)驱动开发 |
OpenWRT(五)驱动开发
|
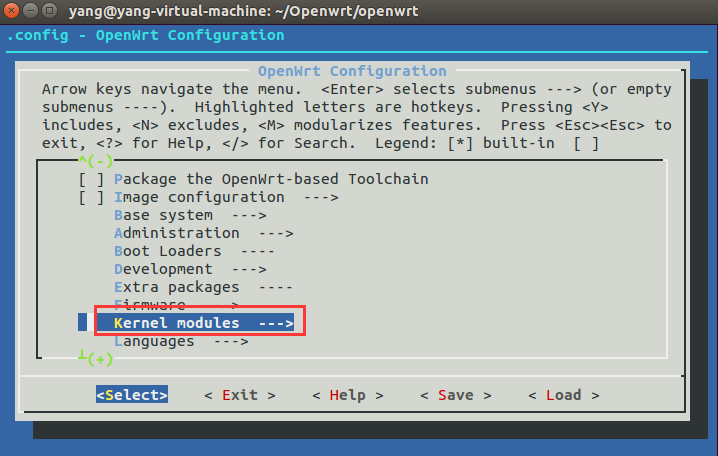
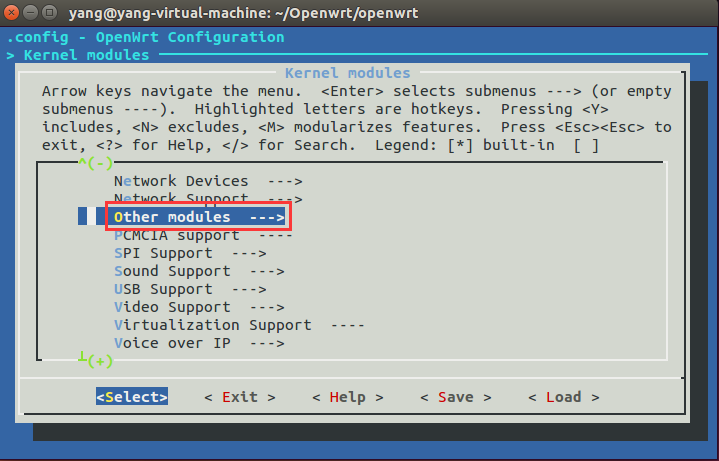
OpenWRT版本:17 一、OpenWRT中的驱动 Openwrt源码中,所有扩展的软件包都在package目录下,自己添加的应用放在该目录下。 所有扩展的内核驱动都在package/kernel目录下,自己添加的驱动放在该目录下。 二、添加驱动步骤 在package/kernel目录下添加一个helloworld文件夹在helloworld添加一个Makefile文件。具体Makefile怎么写,我们先看两个kernel中自带的驱动的Makefile文件。I2C驱动 # # Copyright (C) 2008 OpenWrt.org # # This is free software, licensed under the GNU General Public License v2. # See /LICENSE for more information. # I2C驱动 #包含上两级目录配置 include $(TOPDIR)/rules.mk # TOPDIR : /openwrt include $(INCLUDE_DIR)/kernel.mk # INCLUDE_DIR: /openwrt/include PKG_NAME:=i2c-gpio-custom #驱动名字 PKG_RELEASE:=2 #Makefile的版本号 include $(INCLUDE_DIR)/package.mk #包含上一级目录配置 # make menuconfig时在配置界面上显示的方式 define KernelPackage/i2c-gpio-custom SUBMENU:=I2C support #显示的子选项 TITLE:=Custom GPIO-based I2C device #显示的内容 DEPENDS:=@GPIO_SUPPORT +kmod-i2c-core +kmod-i2c-gpio #依赖于其他模块 FILES:=$(PKG_BUILD_DIR)/i2c-gpio-custom.ko #生成的目标文件 KCONFIG:= endef define KernelPackage/i2c-gpio-custom/description Kernel module for register a custom i2c-gpio platform device. #帮助时显示的内容 endef EXTRA_KCONFIG:= \ CONFIG_I2C_GPIO_CUSTOM=m #编译成模块 # 无需更改 EXTRA_CFLAGS:= \ $(patsubst CONFIG_%, -DCONFIG_%=1, $(patsubst %=m,%,$(filter %=m,$(EXTRA_KCONFIG)))) \ $(patsubst CONFIG_%, -DCONFIG_%=1, $(patsubst %=y,%,$(filter %=y,$(EXTRA_KCONFIG)))) \ # 无需更改 MAKE_OPTS:= \ ARCH="$(LINUX_KARCH)" \ #CPU架构 CROSS_COMPILE="$(TARGET_CROSS)" \ #交叉编译工具 SUBDIRS="$(PKG_BUILD_DIR)" \ EXTRA_CFLAGS="$(EXTRA_CFLAGS)" \ $(EXTRA_KCONFIG) #编译前的准备 define Build/Prepare mkdir -p $(PKG_BUILD_DIR) $(CP) ./src/* $(PKG_BUILD_DIR)/ #PKG_BUILD_DIR:编译时的目录,对应于驱动就是 build_dir/target-**/linux-**/ endef #编译 define Build/Compile $(MAKE) -C "$(LINUX_DIR)" \ $(MAKE_OPTS) \ modules endef #完成前面定义后,必须使用 eval 函数实现各种定义, KernelPackage代表是内核驱动模块,Package表示应用程序 $(eval $(call KernelPackage,i2c-gpio-custom))RTC驱动 # # Copyright (C) 2006-2009 OpenWrt.org # # This is free software, licensed under the GNU General Public License v2. # See /LICENSE for more information. # RTC驱动 include $(TOPDIR)/rules.mk include $(INCLUDE_DIR)/kernel.mk PKG_NAME:=rtc-rv5c386a PKG_RELEASE:=1 include $(INCLUDE_DIR)/package.mk define KernelPackage/rtc-rv5c386a SUBMENU:=Other modules DEPENDS:=@TARGET_brcm47xx TITLE:=Driver for RTC RV5C386A (used in WL-700gE and WL-HDD) AUTOLOAD:=$(call AutoLoad,70,rtc) FILES:=$(PKG_BUILD_DIR)/rtc.ko endef define Build/Prepare mkdir -p $(PKG_BUILD_DIR) $(CP) ./src/* $(PKG_BUILD_DIR)/ endef #有时候CROSS_COMPILE、ARCH、SUBDIRS、EXTRA_CFLAGS会被独立成一个变量,然后再去引用 define Build/Compile $(MAKE) -C "$(LINUX_DIR)" \ CROSS_COMPILE="$(TARGET_CROSS)" \ ARCH="$(LINUX_KARCH)" \ SUBDIRS="$(PKG_BUILD_DIR)" \ EXTRA_CFLAGS="$(BUILDFLAGS)" \ modules endef $(eval $(call KernelPackage,rtc-rv5c386a))根据上面的注释和解释,并对比两份Makefile,我们发现写的基本结构都是相似的,所以我们可以根据上面的模板来自行写一份。 以I2C为模板: # # Copyright (C) 2008 OpenWrt.org # # This is free software, licensed under the GNU General Public License v2. # See /LICENSE for more information. # include $(TOPDIR)/rules.mk include $(INCLUDE_DIR)/kernel.mk PKG_NAME:=helloworld PKG_RELEASE:=2 include $(INCLUDE_DIR)/package.mk define KernelPackage/helloworld SUBMENU:=Other modules TITLE:=HelloWorld FILES:=$(PKG_BUILD_DIR)/helloworld.ko KCONFIG:= endef define KernelPackage/helloworld/description Kernel module for register helloworld. endef EXTRA_KCONFIG:= \ CONFIG_HELLOWORLD=m EXTRA_CFLAGS:= \ $(patsubst CONFIG_%, -DCONFIG_%=1, $(patsubst %=m,%,$(filter %=m,$(EXTRA_KCONFIG)))) \ $(patsubst CONFIG_%, -DCONFIG_%=1, $(patsubst %=y,%,$(filter %=y,$(EXTRA_KCONFIG)))) \ MAKE_OPTS:= \ ARCH="$(LINUX_KARCH)" \ CROSS_COMPILE="$(TARGET_CROSS)" \ SUBDIRS="$(PKG_BUILD_DIR)" \ EXTRA_CFLAGS="$(EXTRA_CFLAGS)" \ $(EXTRA_KCONFIG) define Build/Prepare mkdir -p $(PKG_BUILD_DIR) $(CP) ./src/* $(PKG_BUILD_DIR)/ endef define Build/Compile $(MAKE) -C "$(LINUX_DIR)" \ $(MAKE_OPTS) \ modules endef $(eval $(call KernelPackage,helloworld))基本上就是I2C改成helloworld就OK了! 3、在helloworld文件夹下再新建一个src文件夹,在src下新建一个Kconfig文件。文件内容: # 该文件是make menuconfig显示界面会读取的文件 config HELLOWORLD tristate "HelloWorld driver" default n help This is an HelloWorld Driver!再新建一个Makefile文件,内容为: obj-${CONFIG_HELLOWORLD} += helloworld.o最后新建一个helloworld.c的驱动文件,内容为: #include #include //insmod会执行该函数 static int __init helloworld_init(void) { printk("helloworld driver init !\n"); return 0; } //rmmod会执行该函数 static int __exit helloworld_exit(void) { printk("helloworld driver exit !\n"); return 0; } //声明出入口函数 module_init(helloworld_init); module_exit(helloworld_exit); MODULE_AUTHOR("YANG"); MODULE_LICENSE("GPL");4、接下来就是编译了 先make menuconfig将驱动配置一下。
5、编译出来的驱动模块在openwrt/bin/ramips/packages/kernel/kmod-helloworld_4.4.7-2_ramips_24kec.ipk 如何放到开发板上进行安装呢,请看下节分析O(∩_∩)O哈哈~ |
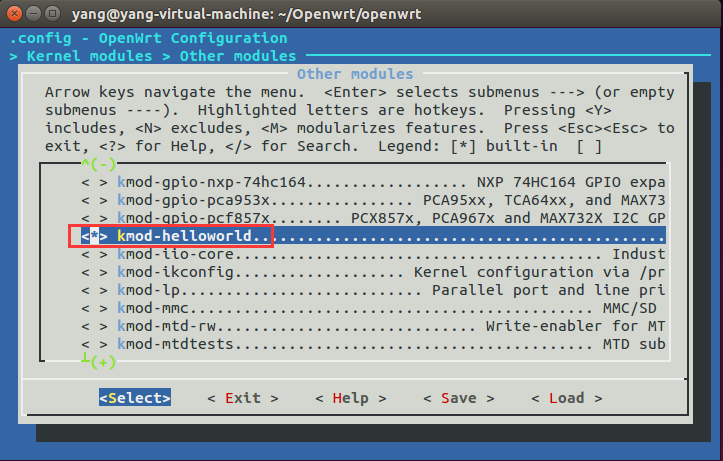 保存后执行 make package/kernel/helloworld/compile V=99
保存后执行 make package/kernel/helloworld/compile V=99【本文地址】